Ongoing Projects
UAV
The aim of this project is to build an autonomous Unmanned Aerial Vehicle (UAV) to assist people during disasters by:- Delivering a first aid kit containing Aspirin, inhaler for asthma patients, non-perishable food items (crackers), antiseptic cream, antibiotic tablets, gauze, cotton, rubbing alcohol, burn ointment and band-aids
- Surveying the affected area and,
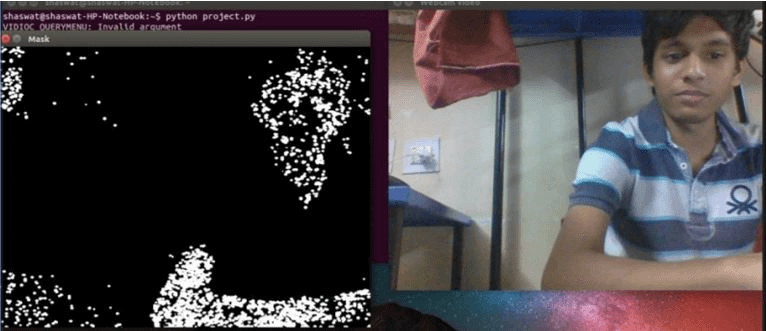
- Locating victims with the help of face detection and object tracking.

The Team
Mechanical - Ajay Prasad, Anmol Mishra, Kshitij Mittal, Prashanthi Balamurugan, Pranjal Samarth
Electrical - Ajay Bisht, H. Bharadwaj, Niharika Yeddanapudi, Rohit Rathnam N, Thej Aravindan, Damodharan K
Computer Science- Arpit Jain, Harshit Vats, Shivam Srivastava
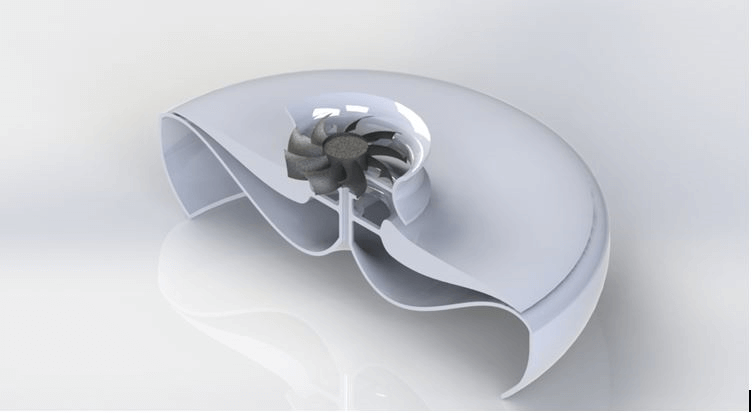
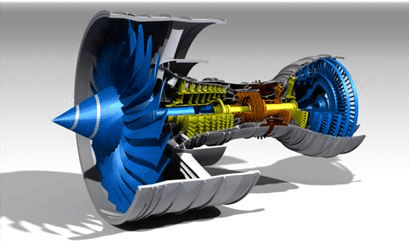
AIAA Engine Design Competition
The AIAA Foundation organises design competitions every year. These competitions offer a great opportunity for students to participate in a simulated real-world problem. SEDS Projects Team is participating in one such design competition organised by AIAA.The current benchmark of the Turboprop engine used in PC-21 aircraft is the PT6A-68B, a single spool gas turbine that has a 2-stage free turbine.
We aim to improvise this design by studying the working of various turbo engines and their components, thereby aiming to increase the efficiency of the model by assessing specific parameters.
The Team
Badriveer Thota,
Dhruv Vijapuri,
Neelesh Katoch,
Keshu Jat,
Nitin Rameseshan,
Naman Soni,
Anushka Vargantwar
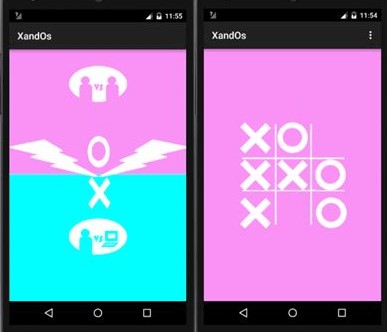
Chess Playing Bot
This project will be using a raspberry pi along with a camera. The camera will recognize the current state of the chess board. Using the analysis the loaded chess engine will compute the best possible move. A robotic arm with 6 degree of motion is also interfaced with the raspberry pi. Using reverse kinematic algorithm the arm will perform the required action.IARRC
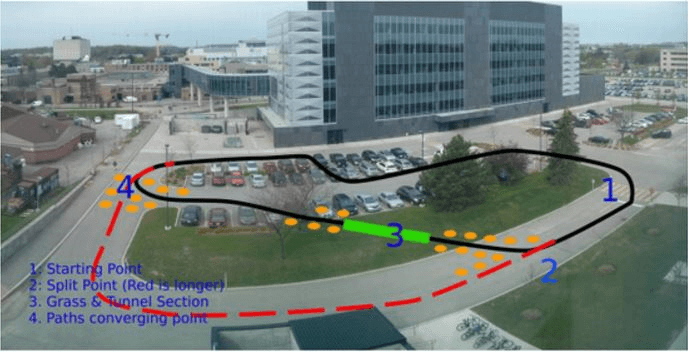
Team Hydra, a subdivision of SEDS Projects Team is participating in the IARRC (International Autonomous Robot Racing Challenge). The competition provides students with real-world, hands-on engineering design challenges, including components of mechanical, computer, control software, and system integration.The aim of this project is to build a small semi-rugged outdoor vehicle which will be able to carry a payload of at least 10kg. All of the car controls should be completely autonomous.
The Team
Mechanical - Prathik Sunku, Subhro Bardhan
Electrical - Anirudh Mandhar, Amit A K
Computer Science- Ojaswi Kumar, Saumay Khandelwal, Arpit Srivastava, Kavan Soni
Management- Harsh Vani, Harsh Vani
Optical methods of automated power factor control
Maintaining power quality has become crucial so as to cater the demand of today's energy needs. This project is aimed at creating an automated system of power factor control by the application of optoelectronics, an area still unexplored.This approach is different than the conventional method of adding capacitors to the circuits and make the control possible from the supply side. Two members of the team are currently doing a research project on this topic.
The Team
Amit Prasad, Waris Khan